 Image credit: FAST-FIRE
Image credit: FAST-FIREAbstract
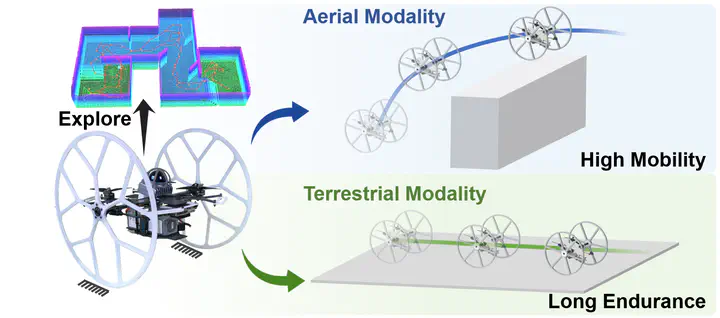
Terrestrial-aerial bimodal vehicles, which integrate the high mobility of aerial robots with the long endurance of ground robots, offer significant potential for autonomous exploration. Given the inherent energy and time constraints in practical exploration tasks, we present a hierarchical framework for the bimodal vehicle to utilize its flexible locomotion modalities for exploration. Beginning with extracting environmental information to identify informative regions, we generate a set of potential bimodal viewpoints. To adaptively manage energy and time constraints, we introduce an extended Monte Carlo Tree Search approach that strategically optimizes both modality selection and viewpoint sequencing. Combined with an improved bimodal vehicle motion planner, we present a complete bimodal energy- and time-aware exploration system. Extensive simulations and deployment on a customized real-world platform demonstrate the effectiveness of our system.
Yanjun Cao 曹燕军
Research Professor
My research interests focuse on key challenges in multi-robot systems, such as collaborative localization, perception, communication, and system organization.
Chao Xu 许超
Full Professor
My research interests include Geometries and Control of Mechanical Systems, Kinematic Agents and Cybernetics, Multi-Physics Driven Robotics, AI-Driven Science.
Fei Gao 高飞
Associate Professor
My research interests include aerial robotics, autonomous navigation, swarm cooperation, and embodied intelligence.